Triaxis® performance 3D & joystick position sensor IC dual output (SENT/PWM)
MLX90378 Melexis

The MLX90378 is a monolithic magnetic position processor IC designed for 3D motion applications (e.g. joysticks).
Top features
-
ISO26262 ASIL-C Safety Element out-of-Context (SEooC)
-
Input/gateway pin for external measurement
-
2-axis joystick measurement
-
Supported output modes:
-
Dual PWM output
-
(fast) SENT output
-
-
Triaxis® Hall technology
-
SENT SAE J2716 APR2016
-
Programmable Linear Transfer Characteristic
-
Programmable measurement range
-
-
Enhanced serial data communication
-
Operating supply voltage from 4.5 V to 18 V
-
Operating temperature from -40°C to 160°C
-
On-chip signal processing for robust absolute position sensing
-
48 bits usable for customer traceability
-
Packages, RoHS compliant
-
SOIC-8 (DC), Single Die
-
TSSOP-16 (GO), Dual Die (Redundancy)
-
-
AEC-Q100 qualified (Grade-0)
-
ISO26262 ASIL-C Safety Element out-of-Context (SEooC)
-
Programmable with the PTC-04 and the PTC-04-DB-HALL06 daughterboard
Triaxis® performance 3D & joystick position sensor IC dual output (SENT/PWM) - MLX90378
Product description
The MLX90378 is a third generation Triaxis® position sensor IC. Thanks to an integrated magnetic concentrator (IMC) on its surface, the monolithic device senses, in a contactless fashion, the three spatial components (i.e. Bx, By and Bz) of the applied magnetic field allowing for the determination of 3D or joystick motion.
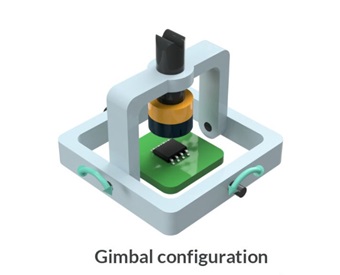
The MLX90378 supports both ball and socket as well as gimbal configurations. The ball and socket configuration is distinguished by the fact that the rotation point of the magnet is above the plane of the sensor while the gimbal configuration has both axes in the same plane as the sensor. Thanks to the multi-point calibration inside the sensor both configurations can be accurately measured.
The MLX90378 is offered as an ASIL-C SEooC (Safety Element out of Context - ISO 26262) component. Contact Melexis to obtain a copy of the MLX90378 safety manual which details the relevant system integration requirements. For applications requiring redundant sensing the MLX90378 is also available in a dual die (fully redundant) TSSOP-16 package.
The output transfer characteristic is fully programmable and offers both SENT or dual PWM outputs. The SENT output supports two angles (forward/backward and left/right) in a single SENT frame or can be configured to give the X, Y, and Z magnetic signals via fast channel multiplexing. The PWM outputs support one angle per output and are configurable via programming. The Melexis programming unit PTC-04 communicates and calibrates the device exclusively through the connector terminals (Vdd-Vss-Out).
The MLX90378 also brings the ability to read an external input. This could be a signal from a temperature sensor, mechanical or hall switch, or another position sensor. The value is measured, linearized (optional), and then encoded for transmission on the SENT bus alongside the angular measurement value allowing for the reduction of wire count and better integration of sensors.
The MLX90378 targets a variety of various applications including automatic shifters, manual transmission gear selection, and HMI applications. The device is available in single and dual die redundant implementations to cost-effectively address the full range of applications, including safety critical sensing requirements.
![]()
Features and benefits
-
ISO26262 ASIL-C Safety Element out-of-Context (SEooC)
-
Input/gateway pin for external measurement
-
2-axis joystick measurement
-
Supported output modes:
-
Dual PWM output
-
(fast) SENT output
-
-
Triaxis® Hall technology
-
SENT SAE J2716 APR2016
-
Programmable Linear Transfer Characteristic
-
Programmable measurement range
-
-
Enhanced serial data communication
-
Operating supply voltage from 4.5 V to 18 V
-
Operating temperature from -40°C to 160°C
-
On-chip signal processing for robust absolute position sensing
-
48 bits usable for customer traceability
-
Packages, RoHS compliant
-
SOIC-8 (DC), Single Die
-
TSSOP-16 (GO), Dual Die (Redundancy)
-
-
AEC-Q100 qualified (Grade-0)
-
ISO26262 ASIL-C Safety Element out-of-Context (SEooC)
-
Programmable with the PTC-04 and the PTC-04-DB-HALL06 daughterboard
Documents and tools
Datasheet(s)
Product flyer(s)
IC handling and assembly
Magnet suppliers
Related tech talks




Videos
Back-end calibration of magnetic position sensors
This video explains the concept of the back-end calibration: a feature of our magnetic position sensors that allows you to compensate for non-linearity error in your application. Different methods of calibration and examples are presented. This will help you understand how to use the calibration and why you may need it.





